
Jen Jen Chung
I am an Associate Professor in the school of Electrical Engineering and Computer Science at The University of Queensland working in Robotic Perception, Planning and Learning (RPPL).
Previously, I was a senior researcher at the Autonmous Systems Lab in ETH Zürich, I was a postdoc at the Collaborative Robotics and Intelligent Systems Institute in Oregon State University and prior to all of that I completed my PhD at the Australian Centre for Field Robotics in the University of Sydney*.
Check out the latest news from RPPL Lab below, along with a list of our current and past research projects.
News
2026
- Looking forward to presenting a Deep Dive Lecture at the AUSROS winter school hosted this year at ANU
- Congratulations to Peter Bohm and Nicholas Smith on their papers accepted to ICRA2026!
- P. Bohm, P. Pounds, P. Moghadam, A. Chapman, and J. J. Chung. Quantization of DRL Models for Embedded Microcontrollers
- N. Smith, J. J. Chung, and G. Best. An Approximate Set Membership Approach to Resilient Multi-Robot Communication
- Congratulations to Francesco Milano for his work on Fast and Scalable Normal Integration usign Continuous Components!
2025
- It was my absolute honour to be general co-chair of the IEEE International Symposium on Multi-Robot and Multi-Agent Systems in Singapore!
- Congratulations to the graduating class of 2025!
- WE ARE HIRING! Multiple Senior Lecturer positions available within the UQ School of Electrical Engineering and Computer Science!
- Our new T-ASE paper comparing Behaviour Trees vs. Finite State Machines is out now!
- Congratulations to Luigi Vanacore for completing his dual Master's degree at UQ and Politecnico di Milano, and for receiving the highest mark for his Master thesis conducted here with us at the RPPL Lab!
- Congratulations to Lewis Luck for publishing and presenting his thesis work at OCEANS! You can check out the paper here.
- My ICRA2025 keynote talk is available online!
- Great to be part of the organising committee of the AUSROS2025 winter school, hosted this year in Brisbane!
- WE ARE HIRING! Multiple robotics lecturer/senior lecturer positions available with the UQ School of Mechanical and Mining Engineering!
- Thanks to the Embassy of Switzerland for inviting me to speak at their Science Diplomats Luncheon panel on The Future of Robotics:
- Fantastic start to the year with two papers accepted to RoboSoft2025! Congratulations to UQ students Benjamin Greenland and Liam Horrigan who conducted this research as part of their BE/ME Industry Placement at CSIRO. Check out their papers on benchmarking soft grasping and a novel dexterous gripper for 6DOF in-hand manipulation!
2024
- Paula Wulkop's paper on learning affordances from interactive exploration using an object-level map was accepted to ISRR2024!
- Great representation of RPPL Lab at the UQ EECS Innovation Showcase!
- Katie Strooper will be presenting our work on informative path planning with minimal environmental disruption at the International Symposium on Artificial Intelligence, Robotics and Automation in Space in November. The symposium is being hosted for the very first time here in Brisbane!
- The IEEE RAS TC on Multi-Robot Systems has established the new Best Disseration Award on Multi-Robot Systems! Applications open to candidates who defended their thesis between 1 September, 2022 and 30 September, 2024. Submission deadline is Monday 18 November AOE:
- IROS news!
- Congratulations to (Dr.) Julian Förster for successfully defending his Doctoral Thesis on Adaptive Symbolic Representations for Task-level Mobile Manipulation Planning!
- The IEEE RAS Multi-Robot Systems Technical Committee is hosting a happy hour at ICRA on Monday 13 May. Register to attend today!
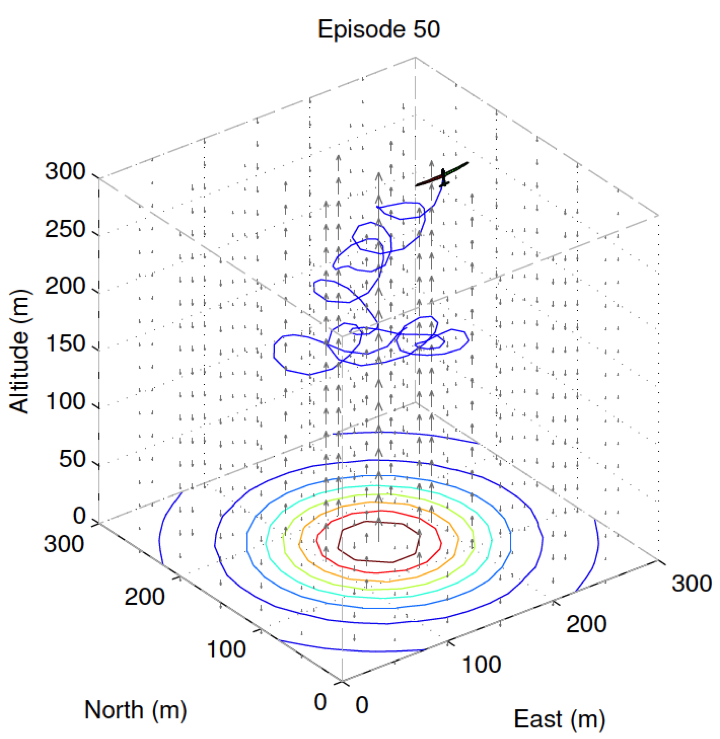
- Massive start to the year for Florian Achermann who's presenting his work on Single-frame, Online, Real-time Thermal Detection at ICRA2024 and just had his paper on Volumetric Wind Prediction accepted into Nature Communications!
- WE ARE HIRING! Come join our robotics team at UQ as our latest Senior Lecturer/Associate Professor! All details can be found here.
- WE ARE HIRING! We have an open PhD position as part of the joint UQ-IITD Research Academy. Looking for keen minds interested in human-multi-robot systems, planning and decision making. All details can be found here.
- Thanks to QASMT for inviting me to deliver your first STEM seminar of the year! I had a blast and I can't wait to see your students in our Mechatronics and Robotics program at UQ!
2023
- Congratulations to Thomas Pitcher and Chelsea Davidson for winning awards at the 2023 EECS Innovation Showcase for their final year theses!
- Thanks to Women in Robotics for putting me on your list of 50 Women in Robotics You Need to Know About 2023!
- Great news! If you missed our RSS Workshop on Robot Representations, the recordings are now available on YouTube! You can find all the links on our workshop website.
- We have two papers at IROS 2023! Go check out Kenneth Blomqvist's work on neural implicit vision-language feature fields and baking in the feature.
- Thanks to the AAAI Inaugural Summer Symposium on Building Connections: From Human to Human-AI Collaboration and International Conference on Automation, Control and Robots for inviting me to give Keynote Talks!
- Our paper on navigating through crowded pedestrian flows is now available in the IEEE Transactions on Intelligent Transporation Systems!
- We're hosting a workshop at RSS2023 in Daegu on Robot Representations for Scene Understanding, Reasoning and Planning! We have a great speaker lineup and submissions are currently open until May 22 (AoE) for papers dealing with:
- Novel advances in 3D scene understanding
- Predicate/affordance reasoning
- High-level planning, and
- Works at the boundary between these research areas.
- Check out Julian Förster's paper on automatic symbolic skill set extension in Robotics and Autonomous Systems — now available open access!
- Thanks UQ MARS for inviting me to give a talk to your members!
- The Springer Proceedings for ISRR are now available. You can find our blue-sky paper here along with all the other papers presented at the conference.
- Our TRO paper on Robust sampling-based control of mobile manipulators for interaction with articulated objects is now available on Early Access!
- ICRA2023 results are out! Check out the four papers we'll be presenting in London:
- Paula Wulkop and Giulio Schiavi's paper on affordance learning for closed-loop manipulation
- Kennth Blomqvist's paper on how to NeRF your object segmentation pipeline
- Matteo Iovino's paper comparing Behavior Trees and Finite State Machines
- Lucas Streichenberg and Elia Trevisan's paper using MPPI for multi-agent interaction-aware path planning
2022
- We are hiring! Full PhD scholarship description here!
- CONGRATULATIONS to our very latest Dr. Michel Breyer! ASL's expert in robot grasping, check out his work on VGN and active grasping
- At ISRR we asked the question: "How do we get robots to understand the world the way we do?" Check out our blue-sky paper here!
- CONGRATULATIONS to our most newly minted Dr. Rik Bähnemann, Dr. Daniel Dugas, and Dr. Florian Achermann! Extremely well done and well deserved!
- Our TRO paper on predicting multi-robot communication connectivity for active planning is now available in Early Access! You can also check it out here!
- IROS papers, videos and code now available on active grasping, world-models for vision-only navigation and flow-based crowd navigation.
- New papers now available!
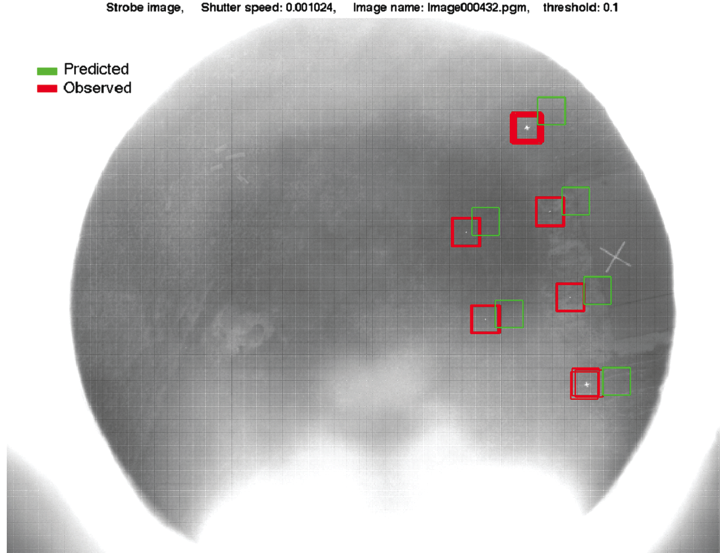
- How to detect landmines from a drone (also including solutions for microsecond time synchronization!) [to the paper]
- Fast generation of keypoint annotation datasets [to the paper] [try it yourself]
- Thanks Ascento for inviting me to give a keynote at your women*'s evening!
- Harmony integration week: Two locations, two robots, one week to kick off our integration efforts!
2021
- Discovered today that the top four most cited papers on my Google Scholar page are all first-authored by women!
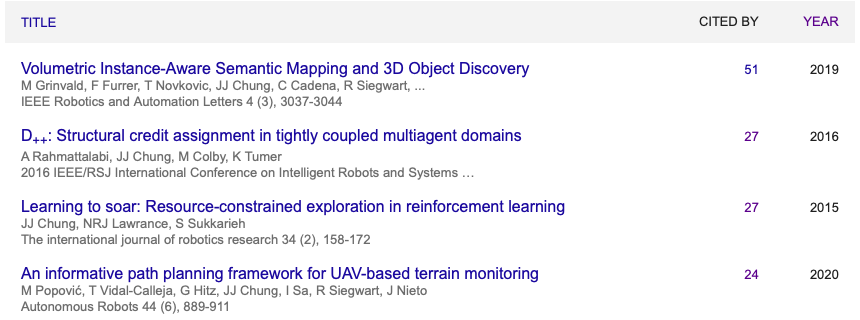
Go and find out more about each of my amazing co-authors: Margarita Grinvald, Aida Rahmattalabi, Marija Popović
- Harmony has a brand new website complete with more information on the project, the partners as well as the latest news and publications.
- Check out the great collaboration between our MAV and MoMa team in our Amazon Research Award project on Omnidirectional Aerial Manipulation! Also find out about the spin off student focus project Griffin who built, tested and flew their own aerial manipulation platform in just 8 months!
- If you hate having to maually check the quality of your stereo camera calibration, check out our paper CalQNet which will be presented at IV2021!
- We have six papers accepted to ICRA (including one accepted to RAL)! Links to papers and code in the publications tab.
- We're kicking off a wonderful new EU H2020 project on mobile manipulation robots for assistive healthcare! Follow the project on Twitter @eu_harmony
- Our paper on Distributed Coverage Control using a Multi-robot System was accepted to RAL!
Project Harmony is off to a fantastic start with our official Kick-off meeting today! So wonderful we could all come together from all over Europe (and the world!) #ProjectHarmony #Robotics #research @ASL_ETHZ @ETH_en @rsiegwart pic.twitter.com/bL4rCFV6Uh
— Harmony EU project (@eu_harmony) February 2, 2021
2020
- Our papers on real-tme 6 DOF grasping in clutter, optical-thermal image alignment and reinforcement learning for visual-inertial sensor calibration will be presented at CORL 2020! Check out the papers available now in the publications tab.
- Our IROS on demand video presentations are now available online!
- Our papers on interaction-aware motion planning, learning multi-robot communication policies and autonomous racing will be presented at IROS 2020! Check out the pre-prints available in the publications tab.
- Check out our ICRA video presentation for Informative path planning for active mapping under localization uncertainty
- Our papers on localisation-aware informative path planning and predicting communication connectivity for cooperative localisation will be presented at ICRA 2020!
- Our JAAMAS paper on The impact of agent definitions and interactions on multiagent learning for coordination in traffic management domains is now available online. Code for the multiagent learning experiments is also available [here]
2019
- Check out our 2019 ASL Christmas video! (Short version and full version below)
- Womenplusplus are organising Hack'n'Lead, Switzerland's first women-friendly hack-a-thon! They're also hosting a series of workshops leading up to the event that you can sign up for [here], with plenty of online material that you can try out for yourself.
- Our paper on "Volumetric instance-aware semantic mapping and 3D object discovery" was nominated for the IROS best paper award on Cognitive Robotics! Check out the paper [here].
- My lecture on "Learning to Coordinate" is now available on the Multi-Robot Systems Summer School website. Follow the [link] to see the recording and slides.
- Our 2nd Workshop on Informative Path Planning and Adaptive Sampling (WIPPAS 2019) will be organized in conjunction with RSS 2019. The workshop will be held on Saturday, June 22, 2019. See you there!
2018
- Check out our Workshop on Informative Path Planning and Adaptive Sampling (WIPPAS 2018) to be organized in conjunction with ICRA 2018. The workshop will be held on Monday, May 21, 2019. See you there!
- Our Special Issue on Online Decision-Making in Multi-Robot Coordination is the April 2018 Issue of Autonomous Robots.
Current and Past Projects
ASL, ETH Zürich


CoRIS, Oregon State University
ACFR, University of Sydney
* Going even further back, I completed my HSC at Hurlstone Agricultural High School after graduating from Sackville Street Primary School.