 Jen Jen Chung
Jen Jen Chung
My research code is available on GitHub. Descriptions of individual repositories are provided below, please see the project outlines on the home page for more details.
RAGS
Code for testing the Risk-Aware Graph Search algorithm on randomly generated graphs (see the IJRR 2019 paper for details on the algorithm). The README.md inside the RAGS repository provides instructions on how to edit the search parameters, build and run the code. The rags_ros package includes the RAGS header files and example ROS nodes for implementing the RAGS planner with the Pioneer3dx Gazebo2 simulation. See rags_ros_how_to_run.txt for the relevant command line instructions.
Multiagent traffic management
Code to train the control policies of a team of neuro-evolutionary agents. These agents apply dynamic costs to travel across edges of a traffic graph with the goal of alleviating traffic congestion. See the AAMAS 2019 and AURO 2018 papers for details on the algorithm.
- multiagent_learning: https://github.com/JenJenChung/multiagent_learning.git
- include: https://github.com/JenJenChung/include.git
- Code documentation [pdf]
Pioneer3dx ROS kinetic and Gazebo7 simulation
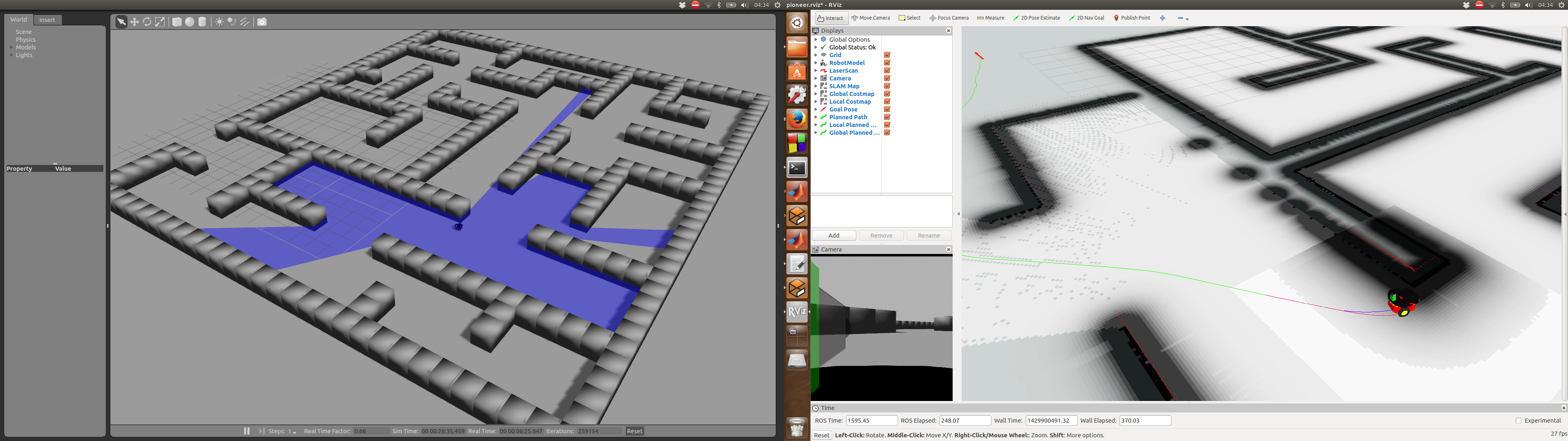
The following packages are an amalgamation of the p2os package and various ROS and Gazebo tutorials. The code and the accompanying documentation are mainly for archival purposes since I'm bound to forget how to replicate it in the future...
- pioneer_gazebo_ros: https://github.com/JenJenChung/pioneer_gazebo_ros.git
- pioneer_description: https://github.com/JenJenChung/pioneer_description.git
- pioneer_2dnav: https://github.com/JenJenChung/pioneer_2dnav.git
- simple_navigation_goals: https://github.com/JenJenChung/simple_navigation_goals.git
- nav_bundle: https://github.com/JenJenChung/nav_bundle.git
- Installation instructions and basic ROS and Gazebo tutorial [pdf]
Pioneer3dx ROS indigo platform testing
Code to run basic SLAM and waypoint navigation on the Pioneer3dx platform in concert with RosAria. Waypoints are sent via Twist messages with appropriated states: [x,y,z], [roll,pitch,yaw], either in the base_link or map frame.
- pioneer_test: https://github.com/JenJenChung/pioneer_test.git
- pioneer_2dnav: https://github.com/JenJenChung/pioneer_2dnav.git
- simple_navigation_goals: https://github.com/JenJenChung/simple_navigation_goals.git
- nav_bundle: https://github.com/JenJenChung/nav_bundle.git
Sensor network benchmarking
Code simulating a decentralised version of the sensor network problem from NIPS RL benchmarking 2005. Code is currently used for investigating informative exploration-exploitation methods in learning.
- Sensor-Network: https://github.com/JenJenChung/Sensor-Network.git